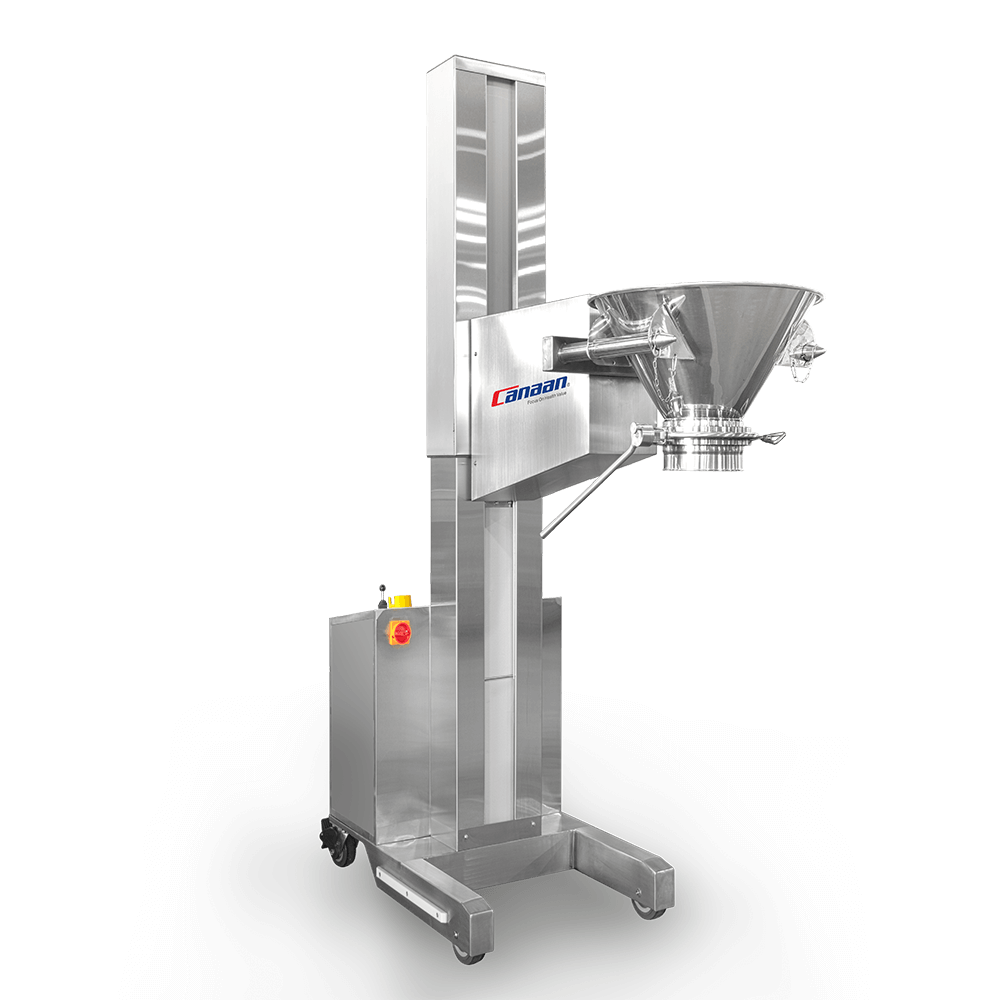
Jak pokazano na rysunku, produkty są ręcznie ładowane do pojemnika wibracyjnego A. Wibrator wibruje i automatycznie wysyła materiały do stołu obrotowego. Materiały są uporządkowane i wysyłane do kanału przez stół obrotowy. Na końcu znajduje się mechanizm ewakuacyjny, który może odkładać materiały jeden po drugim i automatycznie wpadać do butelki. Gdy czujnik elektryczny wykryje butelkę na taśmie przenośnika poniżej, E działa raz, a materiał automatycznie wpada do butelki. Gdy czas pozycjonowania butelki spełnia parametry ustawione przez programowanie PLC, układ pneumatyczny automatycznie wymieni butelkę. Może osiągnąć w pełni zautomatyzowaną pracę; Możesz pakować wiele tabletek do butelki.
Podczas całego procesu operacyjnego telegram wykrywania materiału wysyłany do E za pomocą dwóch cylindrów służy do sprawdzenia, czy w butelce znajduje się środek pochłaniający wilgoć. Butelka zostanie wówczas usunięta.
| Model | IS120 | 1S240 |
| Obowiązujące specyfikacje | Ф25~Ф98mm (wewnątrz otwór butelki jest większy niż średnica pochłaniacza wilgoci, co daje przestrzeń 6 mm) | |
| Specyfikacje środków pochłaniających wilgoć | Długość torby: 15mm~50mm; szerokość torby: 8mm~30mm |
|
| Prędkość produkcji | Maksymalna prędkość 120/240 minut/minutę (w zależności od specyfikacji produktu) | |
| Zasilacz | Prąd zmienny 220 V~(50/60 Hz) | |
| Moc | 0,5 kW | 1,0 kW |
| Ciśnienie powietrza | 0,5~0,7 MPa | |
| Zużycie powietrza | 150 l/min czystego powietrza | |
| Waga sprzętu | Około 330 kg | Około 600 kg |
 +86-577-67378828
+86-577-67378828 kanaan@chinacanaan.com
kanaan@chinacanaan.com